LiDARとは?自動運転を支えるセンシング技術の仕組みや種類、ARでの活用方法
自動車メーカーの多くが公道での自動運転のテストを予定している2020年は、自動運転技術における大きな節目になるでしょう。
その自動運転の要となる技術の一つが、今回紹介するセンシングデバイス「LiDAR(ライダー)」です。
LiDARスキャナは先日発売された最新のiPad Proにも搭載され、AR/VR業界では大きな話題になりました。
今回の記事では
- LiDARの概要・仕組みや原理
- LiDARの方式と活用方法
- 各メーカーのLiDAR開発最前線
- ARにも応用可能?自動運転以外のLiDAR活用方法
- 最新のiPad Proに搭載!ARの機能とは
といった点を取り上げ、分かりやすく解説していきます。ぜひ最後まで読んでみてください。
Contents
誰でもわかるLiDARの仕組み|自動運転における原理や構造を分かりやすく解説
まずは、自動運転の構成要素からLiDARの役割を解説していきます。
前提|自動運転を構成する技術
自動車メーカーを始めとした様々な企業が自動車の自動運転の制御システムの開発の乗り出しており、2020年は日本でも一定条件下での自動運転を行うレベル3(後述します)の実用化が始まろうとしています。
自動運転を構成する要素は複数存在しますが、中でも核となるのが
- 位置推定技術
- 認識技術
の2つになるでしょう。
位置推定技術は、「自動車がどの場所や位置を走行しているか」を特定する技術を指します。
スマホにも搭載されているGPSが有名ですが、GPSは数メートル〜十数メートルの誤差が生じることがあり、自動運転においては更に精度の高い位置特定技術が求められます。
※ARの位置推定に関する関連記事)【3分で分かる、VPSの仕組み】AR領域で不可欠である理由・活用事例を分かりやすく解説
自動運転においては、位置推定に加えて周囲にモノや人、障害物があるかどうかも特定する必要があり、その技術を認識技術と呼びます。
特定位置技術によって自動車の正確な位置を特定し、認識技術によって周囲の状況を正確に把握する。ここにハードウェアと連携した人工知能による運転操作やリスク判断、走路最適化などを組み合わせた自動運転が可能になります。
この、「自分の位置」と「周囲の状況」を正確に把握するための位置推定技術を「SLAM(スラム)」と呼びます。
SLAMを実現するためのセンサーの1つが「LiDAR」
SLAM(=Simultaneously Localization and Mapping)とはその名の通り、ロケーション(位置特定)とマッピング(周囲の認識)を同時に行う技術のことで、そのSLAMのセンサーとしての役割を果たすのが、この記事の主題である「LiDAR(ライダー)」というわけです。
ちなみに、このSLAM技術自体はすでに実用化されています。
たとえば、ルンバなどに代表されるお掃除ロボット。
掃除ロボットは室内の形や様々な家具の配置だけではなく、自分の位置を特定し、移動経路や清掃順を最適化します。
さらに最近ではドローンにこのSLAM技術を搭載し、宅配用としてドローンを活用する実験も行われています。
※自動運転のためにはお掃除ロボットや宅配用ドローン以上に高いSLAM技術が必要になることは間違いありません
まとめると、自動運転は
- 自動車の周囲の状況を3Dで認識
- それを元に地図を作成
- 作成した地図情報をデータベースの地図とマッチングさせ、数十センチメートルの誤差で自車の位置を特定。
- 同時に、障害物なども瞬時に把握
という技術であり、精度の高い情報をリアルタイムで得るためには、非常に精度の高いセンシングデバイスが必要になります。
LiDARとは?構成・原理
LiDARとは「light detection and ranging」の略で、直訳すると『光による検出と距離』となります。
人は運転する際車線や対向車、様々な障害物、標識、信号や歩行者などの様々な情報を視覚によって捉え、それに基づいて脳で判断を下して適切なドライビングを行いますが、自動運転において人間の「眼」の役割を果たすのが、このLiDARなのです。
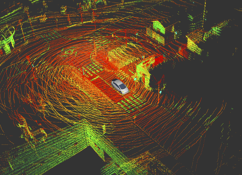
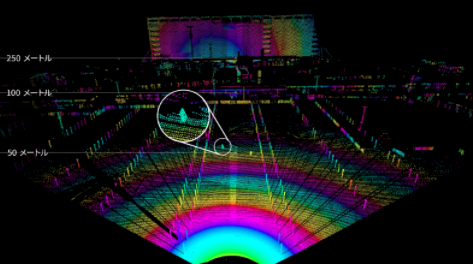
LiDARはレーザー光を照射してその散乱や反射光を測定することによって、周囲の状況を認識します。
下の動画は少し古いものですが、LiDARがレーダーを照射し、周囲の状況を認識しながらマッピングを行う様子をイメージすることができるでしょう。
超音波によって周囲を認識しているコウモリが明かりのない夜間でも自由に飛び回れるように、LiDARは様々なレーザーを駆使して自車の位置や周囲の状況を「視る」ことができるわけです。
自動運転には、その達成度によってレベル0からレベル5までの6段階のレベルが設定されています。
- レベル0:自動運転なし。人間が運転している状態
- レベル1:アクセル・ブレーキ操作もしくはハンドリング操作のどちらかをシステムが行う。
- レベル2:アクセル、ブレーキ、ハンドリングをアシストするが、運転の主体者は人間となる。
- レベル3:高速道路など特定の状況に限り、運転に関わる全ての操作をシステムが行う。ただし、緊急時の対応は人間が行う。
- レベル4:高速道路などの特定の状況に限り、緊急時も含めて全ての操作をシステムが行う。
- レベル5:完全自動運転。制限もなく、全ての操作をシステムが行う。
レベル1~2は正確には「運転支援技術」と呼ばれ、運転の主体者は人間となります。
レベル3以降がいわゆる「自動運転」となり、レベル3以降のシステムにはLiDARの搭載が不可欠といわれています。
ミリ波レーダー・カメラ・レーザーレーダーによるセンシングとの違い
自動運転を実現するためには、様々なセンシングデバイスのレーダー情報を統合し、処理する必要があります。
※レーダーによって得手不得手があり、現在の技術では、1種類のセンサーだけで自動運転に必要な情報を全て検出することはできません
そこで、現在は自動車の位置や周囲の状況を検知するために、
- ミリ波レーダー
- カメラ、
- レーザーレーダ-(LiDAR)
の3つのセンサーを組み合わせることが主流となっています。
では、それぞれのセンサーの長所や短所を見てみましょう。
1.ミリ波レーダー
ミリ波レーダーとは、周波数30GHz~300GHzのミリ波と呼ばれる電波を発射し、その反射によって対象物の距離や水平角度といった位置情報、相対速度などを検知するもの。
ミリ波レーダーのメリット
ミリ波は電波でありながらレーザーのような強い直進性を持ち、雨や霧なども通過できるため、悪天候にも強いというメリットがあります。さらに周囲を走る他の自動車との相対速度を簡単に検出できるため、自動運転には欠かせないセンサーとして機能します。
ミリ波レーダーのデメリット
ミリ波は遠距離まで届く一方で解像度が低く、SLAMで必要な詳細なマッピングを行うことができません。また、樹木など電波の反射率が低い物体は検知できないというデメリットも存在します。
2.カメラ
自動運転のためのカメラには、一般のカメラのような撮影・記録としての役割ではなく、センサーとしての機能が求められます。
自動運転では車体の前後左右にカメラを設置し、360°周囲をカバーします。カメラで捉えた映像から対象物の特徴を割り出し、その情報を元に周囲の車両や標識、路面などの情報を測定します。
カメラのメリット
メリット:カメラの一番のメリットは、歩行者や他の自動車、障害物などを正確に捉えることができる点にあります。複数のカメラから得られた情報を分析することによって、周囲の状況を検知するのに役立ちます。
カメラのデメリット
一方でカメラには、物体までの距離を測定することが難しいというデメリットも併せ持ちます。また悪天候に弱く、雨天や夜間には物体を検知することも難しくなります。
レーザーレーダー
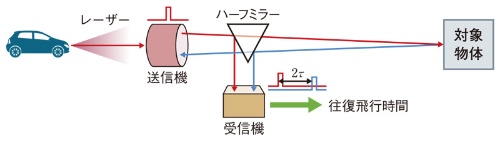
LiDARで使われるのが、レーザーレーダーです。
センサーからレーザー光を照射し、物体に当たって跳ね返ってくるまでの時間を計測することによって距離や方向を測定します。
LiDARは光によって周囲の状況を立体的に認識することが可能となります。レーザー光のため直進性が非常に高く、測定する方向にある複数の対象物を識別する方位分解能が非常に高いのも特徴的。
ミリ電波のように電波の反射率が低い物体も正確に検知することができるため、道路の状況や歩行者、車両などはもちろん、白線や標識、樹木なども高い精度で検出可能です。
LiDARの欠点
LiDARはレーザー光ゆえに雨などの天候条件によっては検出精度が下がる点がデメリット。
加えて、LiDARの難点は価格の高さです。
高精度の方位分解能を誇るLiDARですが、性能ゆえに価格がどうしても高くなってしまいます。
Googleが自動運車両に搭載し、自動運転用LiDARの筆頭とも目されていたVelodyne社のLiDARは1基あたり数百万円ほどもすると言われています。
よって、今後自動運転が普及するためにもLiDARの低価格化を目標に各メーカーが凌ぎを削っている、というのが今のLiDAR開発の現状です。
自動運転におけるLiDARの活用内容
LiDARはレーザー光を照射して、物体に当たって跳ね返ってくるまでの時間を計測して距離を測定します。
大量のレーザーを照射することによって、その物体の立体的な形状や距離を認識することが可能となります。
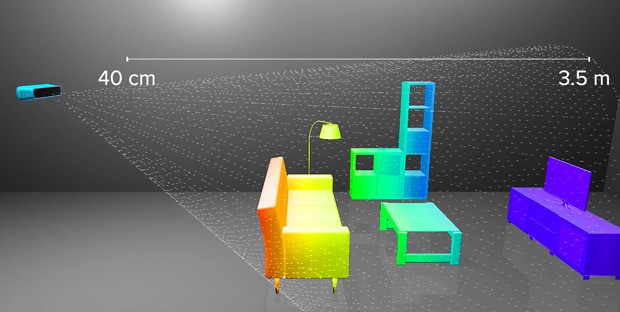
最新式のLiDARは1分間に数百万の光点を照射することによって、対象物や周囲の状況を立体的に把握します。
しかし、レーザーは道路標識の文字や道路の白線などを読み取ることはできないため、他の様々なセンサーを組み合わせて、自動運転のために必要な情報を入手・解析します。
道路状況は絶えず変化します。
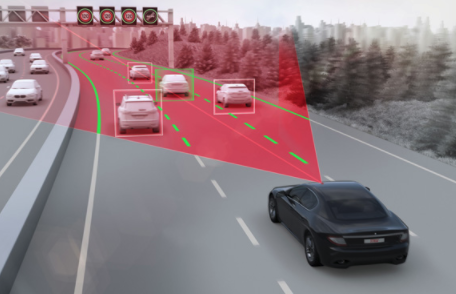
万が一飛び出してくるかもしれない歩行者や急な割り込み車両、道路工事や障害物など、周囲の全ての状況をリアルタイムで検知できなければ自動運転は成り立ちません。
自動ブレーキや車線維持支援システムなどに使われてきたミリ波レーダーやカメラセンサーに加え、LiDARを活用することによって初めて、自動運転が現実のものとなってきているのです。
LiDARの値段・価格 – 安価なLiDARだと数万で購入可能
LiDARは、もともとは地形や気象の観測のために1960年代頃から開発が行われ、高性能なLiDARは価格も非常に高く、ハイエンドのモデルでは1基100万円以上。
それではとても自動車に搭載することはできません。
そこで、最近は自動車向けに「小型・軽量化・低コスト化」したLiDARの開発が進んでいます。
例えば、2012年に創業したスタートアップのLuminar(ルミナー)社は、わずか500ドルという低価格のLiDARを発表し、業界の注目を集めました。

手のひらに乗せられるくらいまで小型化されたLuminar製のLiDAR「第3世代LiDARユニット」はバンパーに簡単に装着でき、トヨタ自動車もその技術力を高く評価していると言われています。
また、アメリカに本拠地を置く自動運転向けLiDARの大手メーカー、Velodyne Lidar(ベロダイン・ライダー)社も、先日開かれたばかりのCES 2020で新型LiDAR「Velabit(ヴェラビット)」を発表しました。

Velabitのサイズは縦・横ともに2.4cm、高さ1.38cmと非常にコンパクトですが、それ以上に驚くのがその価格。
なんと量産化により100ドルでの販売を目指すそう。
世界で初めて3DリアルタイムLiDARセンサーを開発したVelodyne Lidar社ですから、このVelabitもただ安いだけではもちろんありません。
Velabitのセンシング能力は最大100mまで対応、水平視野角は60度、垂直視野角も10度まで検知可能とのこと。
Velodyne Lidar社製の他のセンサーと組み合わせることによって、自動運転を大衆車にまで普及させることを目標としています。
LiDARの方式
LiDARは多数のレーザー光を射出することで物体を検知します。
そのため360度の水平方向に加え、様々な角度にレーザー光を照射しなければなりません。
この、レーザー照射装置の角度を少しずつ変え、さらに360度回転させるための機械部分が高額で、それがLiDARの小型化・低価格化を阻む要因となってきました。
そこで現在、その機械式にかわる新しい方式のLiDARが開発されたことでLiDARの小型化と低コスト化が一気に進むことになりました。
それが「ソリッドステート式」と「MEMS式」と呼ばれるものです。
ソリッドステート式

これまでの3DLiDARは全方位にレーザー光を照射する機械式が主流でしたが、その駆動部分を撤廃し、半導体技術や光学技術に置き換えたものを「ソリッドステート(Solid State)式」といいます。
ソリッドステート式は回転部分を持たないので、レーザー光を照射できる範囲は限られています。
その代わり小型化できるため設置場所の自由度が高く、複数のソリッドステート式LiDARを搭載することにより360度をカバーします。
一つの機械式LiDARで全方位をカバーするのではなく、小型化した複数のLiDARで360度カバーしてしまおう、という発想です。
MEMS式
MEMS(メムス)は「Micro Electro Mechanical Systems」の略で、日本語では「微小電気機械システム」となります。
MEMS式はソリッドステート式の一種で機械部分を廃したのは同様ですが、レーザー光のスキャンにミラーやコイル、磁石などの電磁式のシステムを用いるのが特徴です。
ソリッドステート式と同じくMEMS式も小型化が可能であるため、自動運転の普及に欠かせないと言われています。
実際、ソリッドステート式ならびにMEMS式LiDARの開発には多くの企業が乗り出しており、市場も大きく拡大しています。
2017年にはLiDARの市場規模は25億円程度でしたが、2025年には3,330億円、そして2030年には5,000億円近くまで拡大すると予想されています。
自動運転普及のために、今まさに各メーカーがLiDARの開発に力を注いでいるのです。
3D LiDARを開発するメーカー一覧
では、ここからは国内外のメーカーのLiDAR開発最前線の様子を見てみましょう。
最初に紹介するのは国内最大手、世界でもトップレベルの自動車部品メーカー・デンソーの開発するLiDARです。
デンソー|トヨタが活用するデバイスを開発する実績・技術が最先端の古参メーカー

トヨタ自動車とタッグを組むデンソーは、早くから自動運転技術開発にも取り組んできました。
デンソーは1996年には早くも車載用の2次元LiDARを開発し、翌1997年には乗用車向けの2次元LiDARを商品化。これは世界初の出来事でした。
また2003年にはこれも世界初となる車載用スキャン式ミリ波レーダーの商品化に成功。これは2015年からはトヨタの上級者向け予防安全パッケージ「Toyota Safety Sense P」に搭載されています。
このように、自動運転技術開発にも積極的に取り組むデンソーは、2014年の時点ですでに公道での自動運転走行テストも行っています。
そのデンソーが3DLiDARの開発に乗り出すのは当然のことといえるでしょう。
現在、デンソー2020年以降の実用化を目指して新型のLiDARを開発中とのこと。
トヨタ自動車は2020年の夏にはレベル4の自動運転の公道テストを行うとしていますが、そのテスト車両にもデンソーのLiDARが搭載されるでしょう。
さらにデンソーは前述の通り、LiDARに加えてミリ波レーダーなどのセンシングデバイス開発の実績も持ちます。
性能と価格面で他メーカーの一歩先ゆく存在となるかもしれません。
Pionneer|小型かつ高性能なデバイスが話題

スズキやスバル、マツダ、三菱など国内の様々な自動車メーカー向けに純正製品を開発しているPioneer。
自社の光学技術とMEMS技術を結集し、3DLiDARの開発も行っています。
実際にLiDARの開発を行っているのは、パイオニア株式会社の連結子会社である「パイオニアスマートセンシングイノベーションズ株式会社」。
先日開かれたCEC 2020にて、Pioneerは次世代3DLiDARの試作品を出品しました。
同製品は500メートルの遠距離・高解像度の計測が可能となっており、小型・高性能かつ低価格なLiDARとして注目を集めています。
Pioneerはもともとナビゲーションシステムを開発しており、クラウドデータからマップをリアルタイムで呼び出し自車の位置を高精度で認識する技術にも長けています。
また、PioneerのLiDARはレーダー反射強度の低い、黒色の物体を補足する検出能力にも優れており、従来では認識が難しかった黒色の車も確実に認識できるとのこと。
PioneerのLiDARは4つの異なるタイプを組み合わせることによって、様々な距離や角度に対応します。
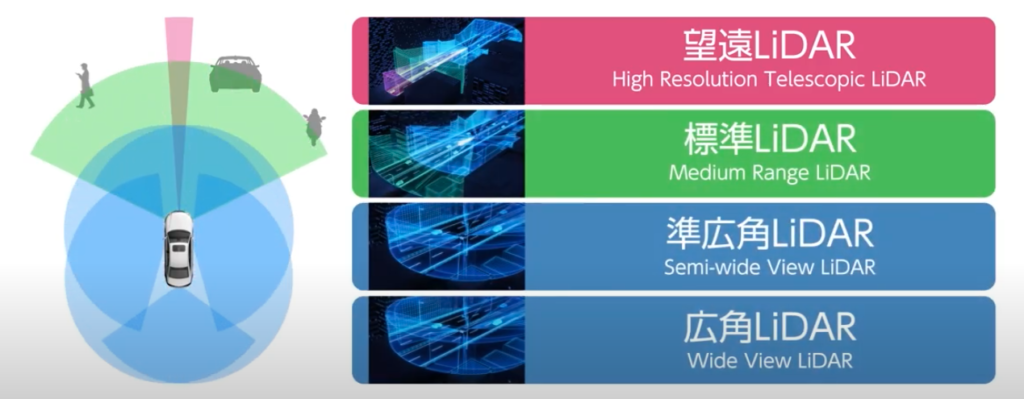
- 標準LiDAR:移動物体検出・認知、他車両、オートバイ、歩行者など
- 望遠LiDAR:前方用・高解像度監視、 道路上落下物検知
- 準広角LiDAR
- 広角LiDAR:位置推定、周辺物体の検出・認知、一般道高精度位置推定用の特緻点スキャン(地図位置推定情報更新含む)
これによって、500メートルの遠距離かつ高解像度の計測が可能となるだけではなく、同社従来製品と比較して5分の1以下の小型化に成功。2020年秋より本格的な量産に入るとしています。
Bosch|自動運転のシステム構築を描く大手自動車部品メーカー

ドイツを本拠とする総合自動車部品及び電動工具メーカーのBosch(ボッシュ)も、ラスベガスで開催されたCES 2020において、新型LiDARの開発を発表しました。
Boschのハラルド・クローガー氏は、「外界センシング用のセンサーを相互に補完させることで、自動運転の実現性をさらに高める」と述べています。

ここでいうセンサーの相互補完とは、カメラとレーダー、そしてLiDARの3つが互いに補完しあい、どのような走行状況でも安全な自動運転を行うということ。
そのためにBoschはLiDARを新たに開発し、販売コストを抑えつつ高性能の製品を市場に投入するとしています。
さらにBoschはセンシングに人工知能を活用し、スキャニングの精度を上げる試みも並行して行っています。
こうした新技術の開発と市場への投入によって、高速道路や一般道、夜間走行時など様々なシーンにおいても安全な自動運転を目指すBosch。LiDAR単体の開発ではなく、自動運転のためのシステム全体を構築しようという試みです。
自動車部品メーカーとして世界最大手のBoschの参入により、LiDARを含めた自動運転技術の競争はより熾烈なものとなりそうです。
Magna International(Innoviz Technologies)|イスラエルのスタートアップと大手メーカー

売上高世界5位のカナダの自動車部品向けメーカー「Magna International(マグナ・インターナショナル)は、イスラエルのLiDAR開発スタートアップ、Innoviz Technologiesに出資してします。
Innoviz Technologiesは2018年の時点ですでに可動部を廃したLiDARを開発しており、今回あらたに新型の高解像度LiDARを開発。
BMWグループに自動運転向けソリッドステート式LiDARを供給しています。
Magna InternationalとInnoviz Technologiesが開発したソリッドステート式LiDARは自動運転レベル3~5にも対応する最先端のもので、高い信頼性を誇るだけではなく、コストパフォーマンスも非常に優れています。
さらに先日ソニーが発表した、最先端テクノロジーを詰め込んだコンセプトカーの製造を担当したのもMagna International社でした。
※参考記事:https://www.itmedia.co.jp/news/articles/2001/08/news092.html
同コンセプトカーに搭載されたのもソリッドステート式LiDARで、自動運転技術の開発は従来の自動車メーカーだけではなく、様々な企業を巻き込んだ戦国時代の様相を呈しています。
AR時代の到来を加速させる|LiDAR SLAMの自動運転以外の応用領域
ここまで自動運転におけるLiDARの役割などについて見てきましたが、LiDARは自動運転以外の応用も見込まれています。
それが、ARクラウド分野への活用です。
ARクラウドとは「時間、空間、デバイスを越えて、一貫したARエクスペリエンスをユーザーに提供するためのリアルタイム空間マップ情報」の総称です。
前提、クラウド技術とは、自社内のハードウェア設備ではなくインターネット上でデータやサービスを提供するサービス形態・技術です。
よって、ARクラウドとは
- リアルタイムで取得する現実空間の情報を仮想空間に生成する(コピーする)
- 仮想空間の情報と、現実空間の情報を連動させる(インタラクションなど)
といったいわば「3D情報の蓄積・提供」であり、上記を実現するために必要な現実空間のスキャン技術の1つが「LiDAR」になるのです。
ARクラウドを構成する3つの基礎技術
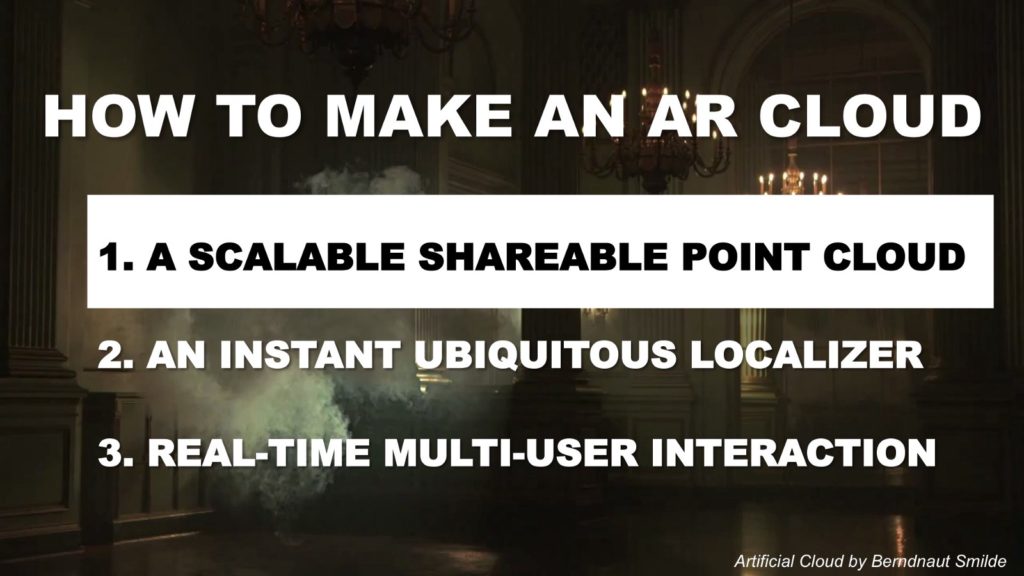
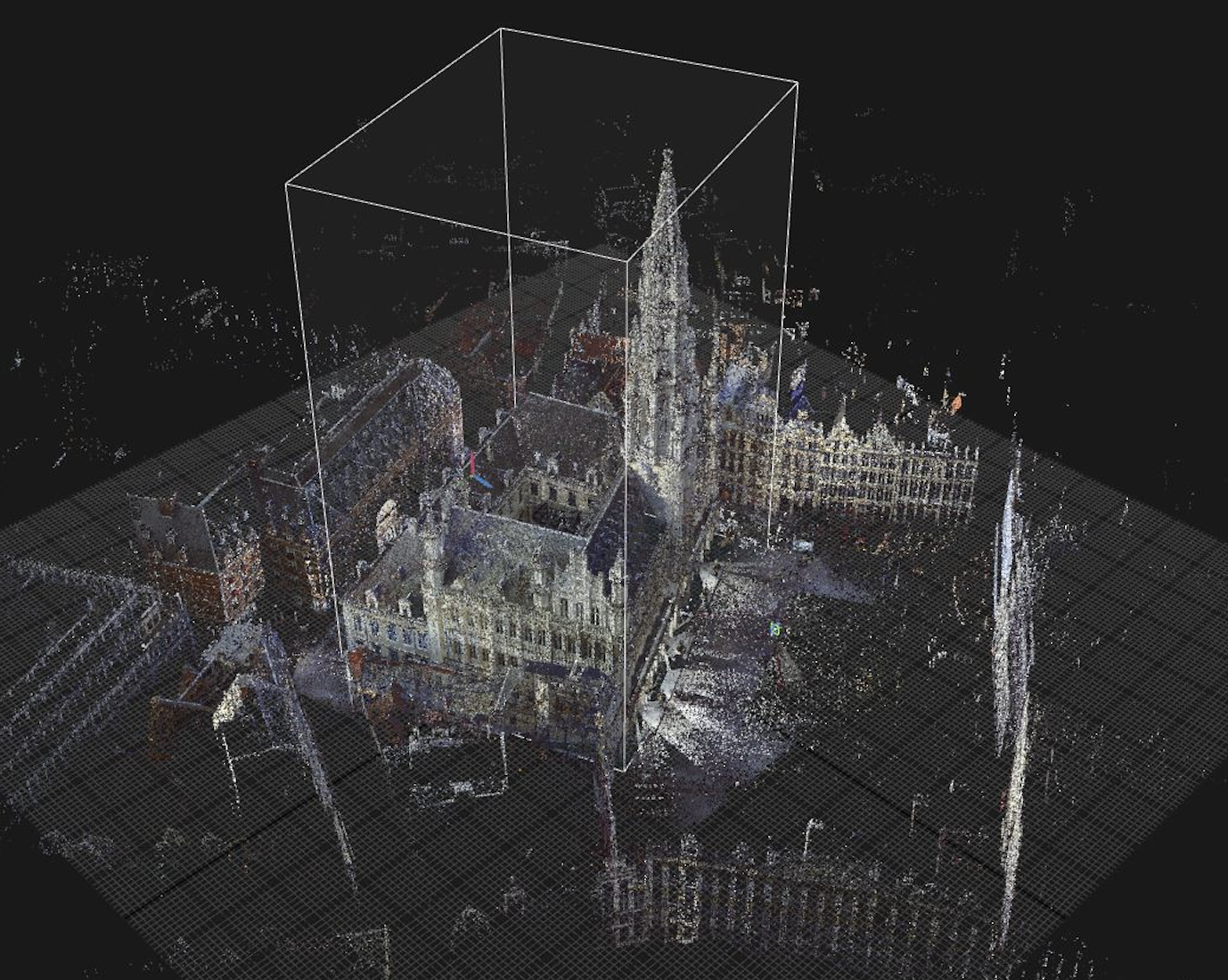
1.実世界の座標に紐づく、永続的な点群(ポイントクラウド)の保有
ARクラウドのためには、まず現実世界に対応する3次元空間(x軸、y軸、z軸)の情報を入手・生成しなければなりません。
いわば、AR情報を共有するための「世界」をクラウド上に再現しなければならないのです。
その三次元の位置を示したポイントが集まったものをポイントクラウド(点群)といます。
2.複数デバイスによる、絶対位置のリアルタイム把握
こちらは、デバイスが自らの位置やカメラが向いている方向を推定する技術です。
複数ユーザーで情報を共有するには、それぞれがどこにいて、どこを向いているかを把握しなければなりません。
例えば二人(A・B)が向かい合った状態でその間に3DCGのオブジェクトがある場合、Aから見たオブジェクトの姿とBから見たオブジェクトの姿は異なります。
こういっった、デバイスをもつ個人の位置とオブジェクトの空間座標(ポイントクラウド)の推定実現のためには、現実空間の正確なコピーとデバイスへのローカライズが必要なのです。
3.現実空間の3Dオブジェクトのコピーのクラウド保存・リアルタイムインタラクション
ポイントクラウドや位置情報など、膨大なデータをリアルタイムで共有・更新するには高速通信が不可欠。次世代の通信規格である5Gなくしては、ARクラウドの実現は難しいでしょう。
ARクラウドの仕組みを簡単にまとめると、現実世界の位置情報をポイントクラウドで特定・再現し、それを複数ユーザーでリアルタイムに共有、更新することが必要となります。
※ARクラウド技術の詳細や活用事例・市場の考察に関して知りたい方は、こちらの記事をご覧ください:【3分で分かる!】ARクラウドの概念から仕組み・応用事例まで解説!
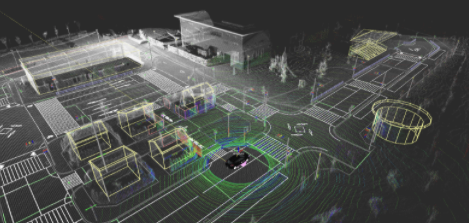
点群データ(ポイントクラウド)の生成に3D LiDARが活用される
ここまでの説明で十分に伝わったかと思いますが、ARクラウドを実現する上で重要になるのが現実空間の座標・点群データの取得であり、そのために活用されるデバイスの1つがLiDARになります。
LiDARの「レーザー光を周囲に射出すことでリアルタイムで3次元の地図情報を作成する技術」はまさしく「ポイントクラウドの生成」であり、ARクラウドの構築に直結します。
よってARクラウドの鍵を握るのが3D LiDAR技術といっても過言ではないのです。
ARクラウドが実現する、未来の社会とは
AR空間をネット上で共有するARクラウド技術の発展は、様々な側面で利便性やエンターテイメントのアップデートをもたらします。
例えば、すでに観光地で「その地や店舗の情報」をARで確認するサービスは既に提供されていますが、あくまで個人が個人のスマートフォン内で楽しむコンテンツであり、ユーザー同士で「同じ情報をリアルタイムで共有する」といった機能は搭載されていませんでした。
ところが、ARクラウドが普及すると個々のユーザーがAR体験をリアルタイムで共有することができ、加えて以前に同じ場所を訪れた人の情報や口コミなども参照できるようになります。
※関連記事)AR Cloudで実現される未来とは?
iPad ProにLiDARが搭載!OSのアップデートで進むARのリアルタイム性

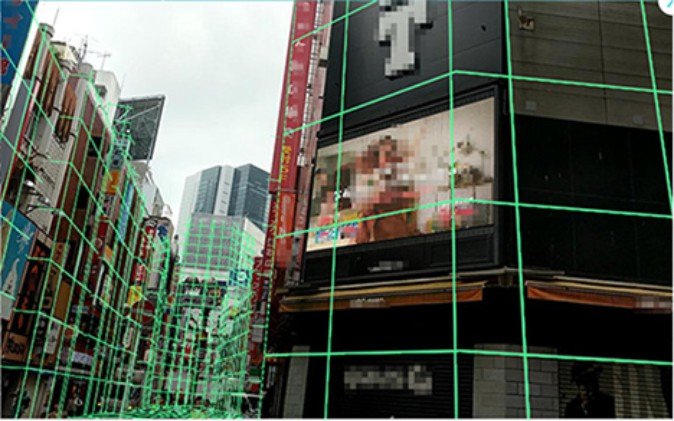
2020年に3月に発売されたiPad ProはLiDARのセンサーが搭載され、同時に同デバイス限定でAppleのAR開発ツール「ARKit」がバージョン3.5に対応。
これまでのARKitでは現実空間のスキャンは画像ベースでしたが、新型のiPadではLiDARベースになり、空間認識機能の改善を通じてAR体験の品質を大幅に改善することに成功しました。
iPad ProのLiDARで部屋をスキャンしてみた。
暗くてもいける。
スキャン対象が何なのかも認識してる。
窓、テーブル、床、イス、壁等 pic.twitter.com/PSLWi6Pd5H— 龍 lilea (@lileaLab) April 4, 2020
ARkIt3.5での主なAR機能のアップデートは以下の3点。
- シーン・ジオメトリ機能の追加
=床・壁・天上・窓など、スペースとオブジェクト認識機能の今日か - インスタントAR
=事前の平面スキャンなく、現実空間を瞬時に認識必須
※これまでのARKitはAR機能を使用する前に、一定時間カメラで周囲を見渡し、平面を検知する必要がありました - モーションキャプチャとヒューマンオクルージョン機能の強化
=人の動きのトラッキングや奥行き・距離測定の精度改善
詳しくはApple公式サイトをご覧ください。
LiDARやARクラウドを活用した実証実験・開発依頼はこちら

ここまでLiDARやARクラウドに関する様々な情報を紹介してきましたが、本メディア「XR-Hub」を運営している株式会社x gardenはXR開発事業・企業向けのXR活用コンサルティング、支援事業を展開しています。
国内の大手観光会社、大手通信会社を始めとした実績が多数あり、国内外の「各産業×AR/VR」の事例収集や事業規模の産出・新規事業の企画・計画書の策定からアプリ・デモの開発まで幅広く支援を行っています(自社でエンジニアを採用しています)。
- ARクラウドに関する実証実験を行いたい
- LiDARをはじめとしたリアルタイムセンシングデバイスを活用した実験を行いたい
- AR開発企業を探している
- ARやVRを事業で活用したい
こんなニーズがある企業担当者の方にはリサーチや要件定義書の設計、開発を含めご要望に応じたコンサルティングを行なっておりますので、
もし「話だけでも聞いてみたい」と興味がありましたらこちらからお問い合わせください。
まとめ
自動運転により、普及は人々の生活は大きく変化します。
人間に代わって自動車の「眼」となるLiDARの開発は、これから一層加速していくでしょう。
そしてそのLiDARは、ARの世界をも一新させる可能性を持っています。
現実世界にCGなどの情報を拡張させるARを、リアルタイムで共有できるARクラウドは別の意味で私たちの世界を変革してくれるはずです。
自動運転とAR、全く異なるかに見える2つの技術を文字通り支える、LiDAR技術の進歩にはこれからも目が離せません。
※関連記事:【2020年最新|ARビジネス活用事例11選】効率化や精度の向上などAR化のメリットに迫る



この記事はいかがでしたか?
もし「参考になった」「面白かった」という場合は、応援シェアお願いします!